La macchina elettrica ha uno statore e un rotore separati da un traferro (Fig. 3.1). Le sue parti attive sono il circuito magnetico e gli avvolgimenti. Tutte le altre parti sono strutturali, fornendo la necessaria rigidità, resistenza, possibilità di rotazione, raffreddamento, ecc.
Il circuito magnetico della macchina, attraverso il quale si chiude il flusso magnetico alternato, è realizzato in laminato - da fogli di acciaio elettrico, come un trasformatore. Se il flusso è costante, il circuito magnetico può essere reso massiccio; in questo caso può svolgere anche funzioni strutturali, ovvero fungere da elemento che garantisce la robustezza di una determinata parte della macchina (statore o rotore).
Dal momento che in parti macchine elettriche il flusso magnetico è chiuso lungo contorni complessi diversi da quelli rettilinei, di norma in essi viene utilizzato acciaio laminato a freddo isotropo. Solo per la fabbricazione di pali di macchine sincrone e macchine di grandi dimensioni corrente continua a volte viene utilizzato acciaio laminato a freddo anisotropo, poiché ai poli la direzione delle linee magnetiche coincide con la direzione di laminazione, in cui la permeabilità magnetica è molto elevata. I nuclei di statori e rotori di macchine asincrone e indotti di macchine sincrone a corrente continua sono stampati da bobine di acciaio laminato a freddo isotroniche, il che consente di risparmiare circa il 10-15% durante il taglio rispetto alla lamiera d'acciaio, per cui la lamiera viene utilizzata molto raramente.
Nelle macchine a bassa potenza viene utilizzato acciaio di grado 2013, a basso contenuto di silicio, abbastanza viscoso, che consente di ottenere piccole scanalature di configurazione complessa. Nelle macchine di media e alta potenza si utilizzano acciai 2212, 2311 e 2411, ad alto contenuto di silicio. Questi acciai sono più fragili, il che li rende difficili da stampare, ma hanno basse perdite di rimagnetizzazione e non richiedono la ricottura dell'anima dopo lo stampaggio.
Nelle micromacchine sono ampiamente utilizzati anche nuclei magnetici assemblati da fogli di leghe ferro-nichel del tipo permalloy.
Lo statore delle macchine asincrone e della maggior parte sincrone è costituito da un circuito magnetico laminato (Fig. 3.2, un), che viene pressato in un telaio fuso (Fig. 3.2, 6 ). Poiché un flusso magnetico alternato non è chiuso attraverso un telaio massiccio, il telaio può essere realizzato in materiale non magnetico (alluminio) o materiale ferromagnetico a bassa permeabilità magnetica (ghisa), relativamente economico e ben adattato alla tecnologia di fonderia. Sulla superficie interna dello statore laminato, nelle scanalature, è posizionato l'avvolgimento dello statore.
Il rotore di una macchina asincrona (Fig. 3.2, in) è solitamente costituito da un'anima realizzata con lamiere di acciaio elettrico. L'anima viene pressata sull'albero o sul manicotto del rotore (per macchine di grandi dimensioni) e compressa con speciali idropulitrici. Nelle scanalature situate sulla superficie esterna del rotore (di forma simile alle scanalature dello statore), si trova l'avvolgimento del rotore. Nelle macchine sincrone, il rotore è reso massiccio, poiché ha poli con avvolgimenti di eccitazione, il cui flusso magnetico è stazionario rispetto al rotore. Nella produzione di fogli di rotore e statore, vengono stampate scanalature (Fig. 3.3, un e b) per la posa dei conduttori degli avvolgimenti del rotore e dello statore, nonché dei condotti di ventilazione per il passaggio dell'aria di raffreddamento.
La configurazione dei denti e delle cave (Fig. 3.4 e 3.5) dipende dal tipo di macchina e dalla sua potenza. Nelle macchine ad alta potenza, gli avvolgimenti dello statore e del rotore sono costituiti da conduttori rettangolari; in questo caso vengono utilizzate fessure aperte di forma rettangolare, che consentono di posizionare al meglio i conduttori e garantirne un isolamento affidabile. Nelle macchine di bassa e media potenza, gli avvolgimenti del rotore e dello statore sono generalmente realizzati in filo tondo; in tali macchine vengono utilizzate scanalature semichiuse di forma ovale o trapezoidale. In alcuni casi, con conduttori di sezione rettangolare, vengono utilizzate scanalature semiaperte, che riducono la resistenza magnetica dello strato "denti - scanalature - traferro" rispetto alle scanalature aperte. Nelle micromacchine, i rotori hanno spesso fessure rotonde; questo semplifica e riduce notevolmente i costi di produzione dei timbri.
Quando si posano i conduttori nelle scanalature, il fondo e le pareti sono ricoperti da materiale isolante (elettrocartone, tela verniciata, micanite, ecc.). I conduttori, così come i loro strati superiore e inferiore, sono anche isolati l'uno dall'altro. Il più alto la tensione alla quale opera la macchina, maggiore dovrebbe essere la rigidità dielettrica dell'isolamento dei conduttori dal nucleo rotore o statore. I conduttori sono rinforzati nelle scanalature del rotore e dello statore con l'aiuto di cunei e sul rotore, inoltre, con l'aiuto di bende metalliche o bende di vetro, che sono avvolte sulle parti frontali del suo avvolgimento (parti del avvolgimento che esce dal nucleo del rotore). In alcuni casi, le bende si trovano in più punti lungo il nucleo del rotore.
Per fornire corrente all'avvolgimento del rotore o collegare ad esso un reostato, è necessario posizionare anelli collettori sul rotore: tre anelli per corrente trifase e due anelli per corrente continua. L'eccezione sono le macchine asincrone a gabbia di scoiattolo, che non richiedono collettori rotanti. L'attuale raccolta degli anelli collettori viene effettuata utilizzando spazzole - barre rettangolari realizzate con una miscela di carbone, grafite e polvere di metallo (rame e piombo). Le spazzole sono installate in appositi portaspazzole e premute contro la superficie di contatto con l'aiuto di molle. Le macchine elettriche fino a circa 2000 kW sono dotate di cuscinetti a sfere oa rulli, che si trovano negli scudi terminali. Per potenze elevate vengono utilizzati cuscinetti radenti.
Auto elettrica corrente alternata- asincrono e sincrono, nonostante le differenze di dispositivo e design, hanno molto in comune nel principio di funzionamento e nella teoria. In queste macchine, passando attraverso gli avvolgimenti dello statore o del rotore, una corrente alternata che cambia in modo sinusoidale nel tempo crea un campo magnetico rotante. Questo campo, a sua volta, attraversa gli avvolgimenti dello statore e del rotore (o uno di essi) e induce in essi un EMF variabile. comunanza processi fisici determina la generalità della teoria e la somiglianza della progettazione di avvolgimenti multifase di corrente alternata e i principi del dispositivo dello statore di una macchina asincrona e dell'armatura di una macchina sincrona.
6.1 Disposizione generale delle macchine AC
Le macchine AC (MPRT) sono dispositivi che convertono l'energia elettrica AC in energia meccanica e viceversa. Come le macchine DC (macchine DC), hanno principio di reversibilità e hanno anche parti mobili e fisse. La parte mobile è chiamata rotore e la parte fissa è chiamata statore.
A differenza di MPT, nelle macchine AC, il nodo più importante è la parte fissa, cioè statore (Fig. 52). Ciò è dovuto al fatto che è nell'avvolgimento dello statore che viene indotto l'EMF. Nel generatore crea una tensione ai terminali della macchina e nel motore determina la quantità di corrente in ingresso e le sue caratteristiche meccaniche.
Oltre che nell'ancora MPT, è posizionato nelle scanalature dello statore. Lo statore è costituito da un alloggiamento (1), un nucleo (2) e un avvolgimento (3). L'avvolgimento delle macchine AC è trifase e questa circostanza è la caratteristica principale delle macchine AC. Il fatto è che a causa dello sfasamento delle correnti l'una rispetto all'altra di 120 0 e della distanza spaziale delle bobine nella cavità dello statore anche di 120 0, è possibile creare campo magnetico rotante. Questo fatto è illustrato in Fig.53. Su di esso c'è una rappresentazione  fluttuazioni di 3 correnti nelle bobine A, B, C, la cui posizione spaziale nello statore è contrassegnata da tre segni nella parte inferiore grafici a torta. Queste bobine sono raffigurate su cerchi in senso orario lungo ciascuno dei sette cerchi, a simboleggiare la cavità interna dello statore. La freccia nera in ogni cerchio rappresenta il campo magnetico totale creato da queste bobine. Quindi, a 0 0, il campo magnetico totale è diretto verso l'alto, verso la bobina A (la corrente al suo interno è positiva). A 60 0 , cioè dopo qualche tempo, la massima corrente - di segno negativo - si verifica nella bobina B e il campo magnetico totale viene diretto dalla bobina B, che si trova nella parte inferiore destra della circonferenza dello statore). A 120 0, la corrente nella bobina C acquisisce il valore più grande - positivo - e il campo magnetico totale risulta essere diretto alla bobina C, situata nella parte inferiore sinistra del cerchio dello statore, ecc. Un punto importante nel cambiamento considerato nell'orientamento del campo magnetico è che rimane modulo costante. Cioè, le fluttuazioni di 3 correnti negli avvolgimenti dello statore portano alla rotazione uniforme di un campo magnetico costante nella cavità dello statore.
fluttuazioni di 3 correnti nelle bobine A, B, C, la cui posizione spaziale nello statore è contrassegnata da tre segni nella parte inferiore grafici a torta. Queste bobine sono raffigurate su cerchi in senso orario lungo ciascuno dei sette cerchi, a simboleggiare la cavità interna dello statore. La freccia nera in ogni cerchio rappresenta il campo magnetico totale creato da queste bobine. Quindi, a 0 0, il campo magnetico totale è diretto verso l'alto, verso la bobina A (la corrente al suo interno è positiva). A 60 0 , cioè dopo qualche tempo, la massima corrente - di segno negativo - si verifica nella bobina B e il campo magnetico totale viene diretto dalla bobina B, che si trova nella parte inferiore destra della circonferenza dello statore). A 120 0, la corrente nella bobina C acquisisce il valore più grande - positivo - e il campo magnetico totale risulta essere diretto alla bobina C, situata nella parte inferiore sinistra del cerchio dello statore, ecc. Un punto importante nel cambiamento considerato nell'orientamento del campo magnetico è che rimane modulo costante. Cioè, le fluttuazioni di 3 correnti negli avvolgimenti dello statore portano alla rotazione uniforme di un campo magnetico costante nella cavità dello statore.
Il campo magnetico risultante (NS) completa un giro completo in un periodo di oscillazione. Come sapete, la corrente trifase industriale ha una frequenza di 50 Hz, quindi la velocità di rotazione del campo magnetico nella cavità dello statore dell'MPRT è 50x60 = 3000 giri/min. A causa della reversibilità delle macchine AC, vale anche l'affermazione inversa: crearne tre corrente di fase con una frequenza di corrente alternata di 50 Hz, in una macchina con 3 bobine, la velocità di rotazione del campo magnetico (N-S) - cioè rotore con una coppia di poli - dovrebbe essere 3000 giri / min. Questo valore di velocità è il massimo per le macchine AC seriali, ma non l'unico possibile.
Infatti, se invece di 3 bobine nella cavità dello statore, 6 bobine sono poste nell'ordine di alternanza "A-B-C-A-B-C", quindi per un periodo di fluttuazione di corrente in ciascuna fase, il vettore di induzione del campo magnetico totale girerà solo 180 0 e la velocità di rotazione del campo diminuirà a 1500 giri/min. In questo caso, il rotore di una tale macchina deve avere 2 coppie di poli "N-S-N-S", poiché dopo lo scadere dell'intero periodo di oscillazioni di corrente e la rotazione del rotore di 180 0, l'orientamento dei poli deve acquisire la sua configurazione originale. Questo è possibile solo se anche i poli del rotore con lo stesso nome hanno un angolo di 180° e i poli opposti hanno un angolo di 90°.
I principali tipi di macchine AC
Le macchine AC in base al numero di fasi sono suddivise in multifase e monofase. Molto spesso, le macchine sono realizzate trifase secondo il sistema di corrente trifase utilizzato nelle centrali elettriche. Per i dispositivi automatici e per gli elettrodomestici si utilizzano macchine bifase e talvolta macchine monofase. Il funzionamento delle macchine multifase e di alcune macchine monofase si basa sulla formazione di un campo magnetico rotante.
Ogni macchina AC, come una macchina DC, è composta da uno statore e un rotore. Secondo il metodo di formazione del campo magnetico dello statore e del rotore, le macchine CA sono divise in due gruppi: asincrone e sincrone.
MA. macchina asincrona. Una macchina asincrona è una macchina a corrente alternata, in cui la velocità di rotazione del rotore dipende dal carico. Il campo magnetico in una macchina asincrona è creato dalla corrente alternata negli avvolgimenti dello statore e del rotore. La velocità di rotazione del rotore è diversa dalla velocità di rotazione del campo.
Le macchine asincrone si dividono in brushless e collector. Le macchine asincrone brushless sono le macchine elettriche più comuni nell'economia nazionale e sono utilizzate principalmente come motori. Le macchine asincrone a collettore hanno una maggiore varietà di caratteristiche rispetto a quelle brushless, vengono utilizzate anche come motori, ma hanno un'applicazione limitata.
Il tipo principale di macchina asincrona brushless è motore trifase in due versioni principali: un motore con avvolgimento del rotore di fase (Fig. 1, a) e un motore con avvolgimento del rotore a gabbia di scoiattolo (Fig. 1.6). Gli schemi strutturali di queste macchine sono mostrati in fig. 1, dove 1 è il nucleo dello statore, assemblato in lamiera di acciaio elettrico, 2 è un avvolgimento dello statore trifase collegato alla rete CA, 3 è il nucleo del rotore, 4 è l'avvolgimento di fase del rotore, 5 è un anello di contatto per il collegamento con un reostato di avviamento o regolazione, 6 - avvolgimento del rotore in cortocircuito.
Riso. 1. Schema strutturale di una trifase motore a induzione: a - con avvolgimento del rotore di fase, b - con avvolgimento del rotore a gabbia di scoiattolo
B Macchina sincrona. Una macchina sincrona è una tale macchina a corrente alternata, la cui velocità di rotazione del rotore è uguale alla velocità di rotazione della prima armonica del campo dello statore ed è determinata da 
Riso. 2. Schema strutturale di un generatore sincrono trifase 
frequenza/corrente alternata nell'avvolgimento statorico e numero di coppie polari della macchina
(1)
Di norma, il campo magnetico in una macchina sincrona è creato dall'avvolgimento CC del rotore e dall'avvolgimento CA dello statore. Nelle macchine sincrone a bassa potenza, vengono utilizzati magneti permanenti (magneti) invece di un avvolgimento CC sul rotore.
amacchine elettriche sincrone) o il campo magnetico è creato solo dalla corrente alternata dell'avvolgimento dello statore (macchine sincrone a riluttanza). Le macchine sincrone sono ampiamente utilizzate come generatori di corrente alternata trifase nelle centrali elettriche e sono utilizzate anche come motori elettrici.
Sulla fig. 2 mostra uno schema strutturale di una macchina sincrona trifase. Qui 1 - nucleo dello statore, 2 - avvolgimento dello statore trifase, 3 - poli del rotore con avvolgimento CC, 4 - anelli per il collegamento dell'avvolgimento del rotore a una sorgente CC, 5 - ventole. 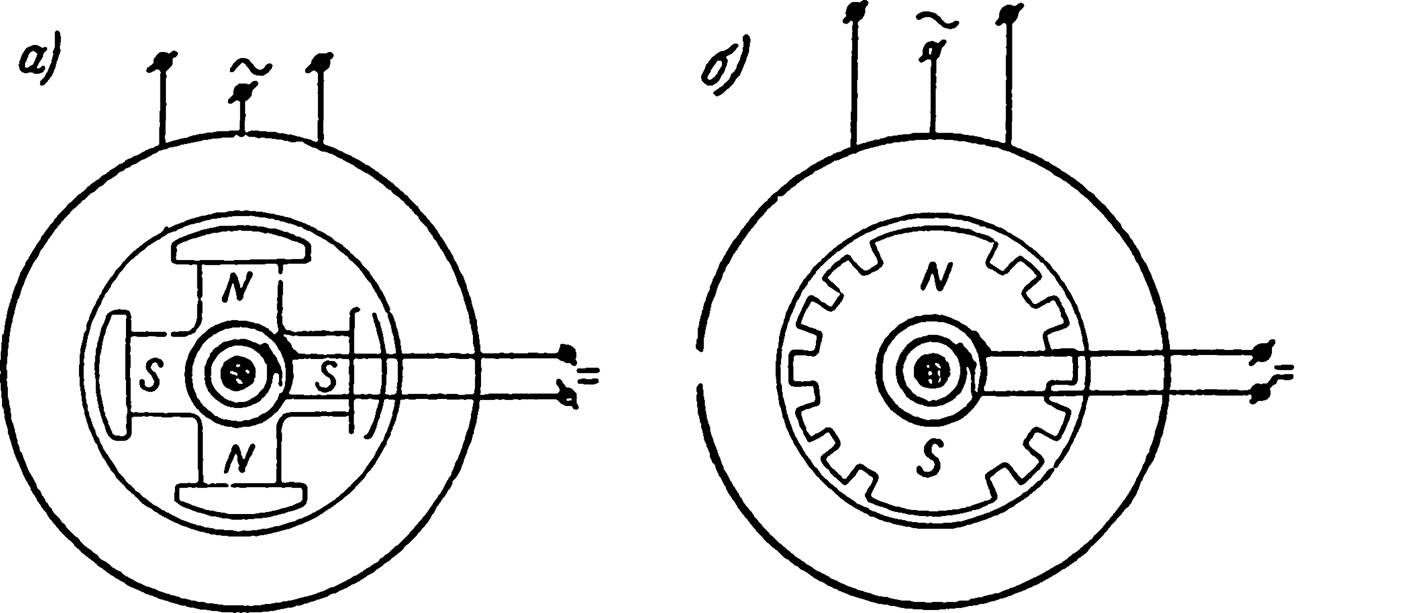
Riso. 3. Le principali tipologie di macchine sincrone: a - con rotore a poli salienti, b - con rotore a poli non salienti
Secondo il dispositivo rotore si distinguono due tipi di macchina sincrona: una macchina con rotore a polo saliente, in cui le bobine degli avvolgimenti CC sono poste su poli sporgenti (Fig. 3, a) e una macchina con rotore a polo non saliente , in cui l'avvolgimento DC distribuito è posato nelle scanalature del rotore (Fig. 3.6).
La macchina sincrona a poli salienti è realizzata per velocità di rotazione fino a 1500 giri/min e viene utilizzata come generatore o motore. Le macchine sincrone più grandi sono installate nelle centrali idroelettriche e sono azionate da turbine idrauliche a velocità fino a 300 giri/min.
La macchina sincrona a poli non salienti è utilizzata principalmente come generatore nelle centrali termiche ed è azionata da una turbina a vapore ad una velocità tipica di 3000 giri/min (alla frequenza di 50 Hz).
Elementi generali del dispositivo e teoria delle macchine AC
Gli avvolgimenti dello statore sono solitamente collegati a una rete in corrente alternata e creano un campo magnetico rotante, quindi il dispositivo di questa parte di macchine asincrone e sincrone è lo stesso. Il nucleo dello statore è realizzato in lamiera elettrica
acciaio spessore 0,5 mm.
Sulla superficie interna dello statore sono presenti scanalature in cui è posato l'avvolgimento. La forma della scanalatura dipende principalmente dalla potenza della macchina. 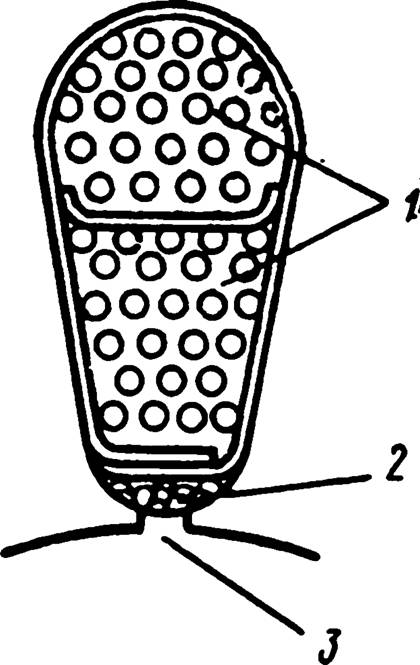
Riso. 4. Scanalatura parzialmente aperta
Con potenza fino a 100 kW e tensione fino a 500 V, vengono utilizzate scanalature ad apertura parziale (Fig. 4). L'isolamento dell'avvolgimento dal nucleo è solitamente a tre strati: due strati di cartone elettrico e tra loro uno strato di tela verniciata o pellicola sintetica. Lo spessore totale dell'isolamento è 0,3-0,7 mm. I lati 1 di bobine morbide di filo tondo vengono posati attraverso l'apertura 3 della scanalatura, uno o più conduttori ciascuno, quindi i bordi dell'isolante vengono piegati e chiudono così ciascuna scanalatura. I lati della bobina sono trattenuti nella scanalatura da un cuneo 2 in legno o laminato. 
Riso. 5. Fessura parzialmente chiusa e isolamento dell'avvolgimento
1 - guarnizione in cartone elettrico impregnato, spessore 0,2 mm,
2 - nastro calicò end-to-end, spessore 0,15 rafia, 3 - pad in cartone elettrico, spessore 0,5 mm, 4 - cartone elettrico impregnato, spessore 0,20 mm in 1 strato, 5 - panno verniciato nero 0,3 mm di spessore in 1 strato , c - cartone elettrico impregnato, spessore 0,10 mm 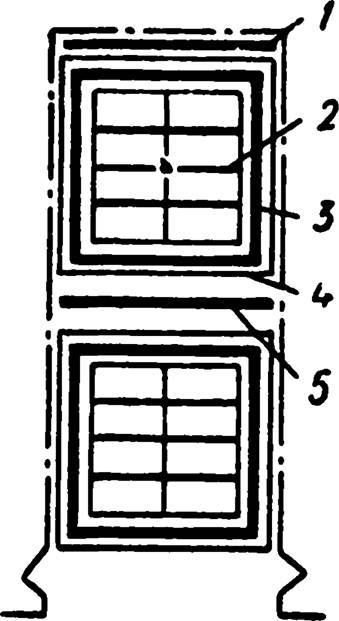
end-to-end, 7 - guarnizione in cartone elettrico spessore 0,2 mm
Riso. 6. Scanalatura aperta e isolamento dell'avvolgimento
1 - tampone in cartone elettrico (spessore 0,5 lx), 2 - tampone in micanite (spessore 0,2 lyk), 3 - micafolium (spessore 9 strati 0,25 lsh), 4 - cartone elettrico (spessore 1 strato 0,15 lx), 5 - guarnizione realizzata di cartone elettrico con uno spessore di 1,7 corteccia
Le scanalature parzialmente chiuse (Fig. 5) sono utilizzate per macchine con una potenza fino a 400 kw e una tensione fino a 500 V. In questo caso, ogni bobina è composta da due semi-bobine avvolte con un filo rettangolare. Le semibobine ricevono la loro forma finale su speciali dime prima di essere posate nelle scanalature.
Nelle macchine di alta potenza e con tensioni superiori a 500 V, le bobine sono realizzate in filo rettangolare e isolate prima di essere posate in scanalature rettangolari (Fig. 6).
Le macchine a corrente alternata sono leggermente diverse nel design dalle macchine a corrente continua. Ogni macchina è composta a partire dal due parti principali: la parte fissa, detta statore, e la parte rotante, detta rotore. A differenza delle macchine a corrente continua, le macchine a corrente alternata hanno un avvolgimento dell'indotto sullo statore e un avvolgimento di eccitazione sul rotore. Invece di un collettore, il rotore ha anelli isolati attraverso i quali la corrente viene condotta all'avvolgimento di eccitazione. Le macchine AC sono sincrone e asincrone.
Le macchine sincrone e simili sono chiamate corrente alternata, la cui velocità di rotazione è determinata dalla frequenza della corrente. Con una variazione della frequenza della corrente, tali macchine contemporaneamente (in modo sincrono) cambiano la velocità. Di norma, nelle macchine sincrone, una corrente continua da una fonte esterna passa attraverso l'avvolgimento di eccitazione. Le macchine sincrone sono reversibili, ovvero possono funzionare come generatori e motori elettrici. Il design di un motore sincrono è quasi lo stesso del design di un generatore sincrono.
Poiché sulle navi della marina i circuiti CA sono alimentati da generatori sincroni trifase, ci soffermeremo sul loro dispositivo e sul loro principio di funzionamento.
L'avvolgimento dell'indotto di un generatore sincrono trifase si trova nello statore ed è costituito da tre avvolgimenti di fase separati spostati l'uno rispetto all'altro di 120 ° C (1/3 del periodo) in modo che l'indotto e. ds in ogni fase ha raggiunto il suo massimo 1/3 del periodo dopo il massimo e. ds fase confinante. L'avvolgimento di eccitazione è posto sul rotore e la fonte di alimentazione può essere un piccolo generatore CC (eccitatore) montato sullo stesso albero con un generatore sincrono o persino una batteria.
Gli avvolgimenti dello statore sono collegati tra loro da una stella o un triangolo, mentre tre fili (tre contatti) vanno al circuito esterno dall'avvolgimento dello statore. Sulla fig. 167 mostra uno schema e una sezione longitudinale di un alternatore sincrono trifase con eccitatore.
Gli avvolgimenti dello statore sono collegati tra loro da una stella o un triangolo, mentre tre fili (tre contatti) vanno al circuito esterno dall'avvolgimento dello statore. Sulla fig. 167 mostra uno schema e una sezione longitudinale di un generatore sincrono di corrente alternata trifase con eccitatore.
Il rotore è costituito da nuclei polari 1, bobine di eccitazione 2, alimentato da corrente continua tramite collettori rotanti 5. Lo statore è costituito da armatura attiva in acciaio 3, fungendo da conduttore magnetico e il letto 6, serve per il fissaggio di ancoraggi in acciaio e l'installazione della macchina sulla fondazione. L'acciaio attivo dell'ancora è costituito da lamiere di acciaio speciale con uno spessore di 0,5 o 0,35 mm. Le lastre sono isolate su entrambi i lati con una vernice speciale. Avvolgimento 4 si inserisce nelle scanalature stampate nell'acciaio dello statore.
Sulla fig. 168, un mostra il posizionamento di un avvolgimento statorico trifase (su un quarto della sua parte) e nei diagrammi b e in- collegamento dell'avvolgimento statorico a triangolo ea stella.

Quando è collegato a un triangolo, l'inizio della prima fase I è collegato alla fine di II, l'inizio di II - alla fine di III e, infine, l'inizio di III - alla fine di I. Quando si collega il avvolgimenti dello statore con una stella, le estremità di tutte le fasi sono collegate in un punto, chiamato zero, e gli inizi di tutte le fasi rimangono liberi e a ad esso è collegato un circuito esterno, nel quale viene immessa l'energia elettrica generata dal generatore.
Sincrono generatori trifase sono attualmente le principali fonti energia elettrica sia nelle centrali elettriche costiere che navali di qualsiasi capacità.
Attualmente i generatori sincroni trovano largo impiego sulle navi marittime, in cui l'avvolgimento di eccitazione è alimentato dalla corrente dello statore, preventivamente rettificata mediante raddrizzatori. Il circuito di eccitazione di queste macchine prevede una tale variazione della corrente di eccitazione, in cui la tensione ai terminali del generatore viene mantenuta pressoché costante. Tali generatori sono chiamati generatori sincroni con autoeccitazione e autoregolazione della tensione.
Il design di un motore sincrono non è fondamentalmente diverso dal design di un generatore sincrono. Per far funzionare il generatore sincrono in modalità motore, è necessario spegnere il motore primo e portare una corrente trifase dal circuito agli avvolgimenti di fase dello statore. In questo caso, il generatore diventerà un motore elettrico sincrono che consuma corrente. Passando attraverso gli avvolgimenti di fase, una corrente trifase alternata crea un campo magnetico rotante che, interagendo con l'elettromagnete del rotore, lo trascina nel senso della sua rotazione. Di conseguenza, il rotore ruoterà con la stessa frequenza del campo magnetico rotante, mentre non si fermerà, anche se gli dai un carico collegandolo a qualche meccanismo. Questa è l'essenza del funzionamento di un motore sincrono.
La regolazione della velocità di rotazione del rotore di un motore sincrono viene eseguita modificando la frequenza della corrente del circuito e modificando il senso di rotazione del rotore, commutando due fasi qualsiasi, ad es. riconnessione reciproca di due fili di alimentazione. Gli svantaggi dei motori sincroni includono il fatto che durante l'avviamento devono essere ruotati da un meccanismo esterno a una velocità che fornisca un campo magnetico rotante dello statore.
Per superare questa mancanza, avvio asincrono motori elettrici sincroni, che sta nel fatto che all'avvio, la corrente alternata viene fatta passare dal circuito attraverso speciali avvolgimenti del rotore.
TRASFORMATORI
Un trasformatore è un dispositivo elettromagnetico progettato per aumentare o diminuire la tensione di una corrente alternata. L'azione del trasformatore si basa sul fenomeno dell'induzione elettromagnetica.
Il trasformatore è costituito da un nucleo d'acciaio chiuso 1 (Fig. 169), assemblato da piastre di acciaio speciale per trasformatori. Le bobine sono messe sul nucleo 2 e 3 (avvolgimenti) con un diverso numero di spire di filo isolato. Un avvolgimento, chiamato primario 2, collegato a una sorgente CA. Crea un campo magnetico alternato che magnetizza il nucleo. In un altro avvolgimento - secondario 3 (potrebbero esserci più avvolgimenti secondari) a causa dell'induzione elettromagnetica, si genera una corrente alternata.
La tensione alle estremità dell'avvolgimento secondario dipende dal numero di giri in questo avvolgimento. Se il numero di spire dell'avvolgimento secondario è uguale al numero di spire dell'avvolgimento primario, la tensione nell'avvolgimento secondario sarà la stessa dell'avvolgimento primario. Se il numero di spire dell'avvolgimento secondario è inferiore al numero di spire dell'avvolgimento primario, ad esempio "di due volte, la tensione fornita dall'avvolgimento secondario sarà la metà di quella dell'avvolgimento primario.
Un trasformatore che fornisce una tensione inferiore alla tensione primaria è chiamato trasformatore step-down e un trasformatore che fornisce una tensione superiore alla tensione primaria è chiamato trasformatore step-up.
Se l'avvolgimento secondario è aperto con il circuito e l'alimentazione viene fornita ai terminali dell'avvolgimento primario, questa modalità di funzionamento del trasformatore viene chiamata inattiva. Fatta eccezione per le perdite dovute al riscaldamento dei conduttori degli avvolgimenti e del nucleo del trasformatore, durante la trasformazione le correnti primarie e secondarie sono approssimativamente inversamente proporzionali al numero di spire degli avvolgimenti corrispondenti, ed e. ds Gli avvolgimenti primari e secondari sono direttamente proporzionali al numero di spire dei rispettivi avvolgimenti. La potenza della corrente primaria nei trasformatori è approssimativamente uguale alla potenza della corrente secondaria e le correnti negli avvolgimenti del trasformatore sono inversamente proporzionali alle tensioni su questi avvolgimenti.

Per trasformare una corrente trifase si utilizzano trasformatori trifase con tre avvolgimenti primari e tre secondari (a tre steli) o trasformatori di gruppo, che sono composti da tre monofase (in ogni fase è compreso un trasformatore). Gli avvolgimenti primari e secondari possono essere collegati tra loro in una connessione a stella oa triangolo. I processi che si verificano in ciascuna fase di un trasformatore trifase, in linea di principio, non differiscono da quelli dei trasformatori monofase.
Oltre ai trifase vengono utilizzati i cosiddetti autotrasformatori (principalmente per installazioni in bassa tensione), che presentano un solo avvolgimento, parte del quale è comune ai circuiti primario e secondario.
Sulle navi, vengono utilizzati tipi speciali di trasformatori navali per l'installazione su ponti aperti e interni. Tutti i trasformatori marini sono prodotti in involucri chiusi dotati di zampe per il fissaggio.
Il trasformatore deve essere ispezionato prima di essere collegato al circuito e assicurarsi che non vi siano corpi estranei, sporco, acqua e oli su di esso e in prossimità delle aperture di ventilazione.
MOTORI ASINCRONI
I motori asincroni sono chiamati motori in cui la velocità del rotore è in ritardo rispetto alla velocità del campo magnetico dello statore quando una corrente trifase passa attraverso i suoi avvolgimenti.
Quando una corrente trifase passa attraverso gli avvolgimenti dello statore di una macchina trifase, si forma un campo magnetico rotante, sotto l'influenza di un elettricità. Per effetto dell'interazione del campo magnetico rotante dello statore con le correnti indotte nei conduttori del rotore, si genera una forza meccanica che agisce sul conduttore di corrente, creando una coppia che mette in moto il rotore. Allo stesso tempo, la velocità del rotore di un motore asincrono è sempre inferiore alla velocità del campo magnetico rotante dello statore a causa dello scorrimento del rotore, che per i motori moderni è di circa il 2-5%.
Pertanto, un motore a induzione riceve energia fornita al rotore da un flusso magnetico rotante (induttivo), a differenza dei motori a corrente continua, in cui l'energia viene fornita tramite fili. I motori asincroni, a differenza dei motori sincroni, sono eccitati dalla corrente alternata.

Un motore asincrono, come un motore sincrono, è costituito da due parti principali: uno statore con avvolgimenti di fase attraverso il quale passa una corrente alternata trifase e un rotore, il cui asse è poggiato su cuscinetti. Il rotore può essere cortocircuitato e in fase (Fig. 170).
Rotore a gabbia di scoiattolo (Fig. 170, in)È un cilindro, attorno alla cui circonferenza si trovano dei conduttori paralleli al suo asse, chiusi l'uno all'altro su entrambi i lati del rotore da anelli (a forma di ruota di scoiattolo).
Un motore asincrono con un tale rotore è chiamato motore a gabbia di scoiattolo. I suoi svantaggi includono: bassa coppia di spunto e alta corrente negli avvolgimenti dello statore durante l'avvio. Se vogliono aumentare la coppia di spunto o ridurre la corrente di spunto, usano motori asincroni con rotore di fase (Fig. 170, G). Questi motori hanno lo stesso avvolgimento sul rotore dello statore. In questo caso, le estremità degli avvolgimenti sono collegate a collettori rotanti (Fig. 170, e) situato sull'albero motore. Gli anelli di contatto sono collegati al reostato di avviamento mediante spazzole.
Per avviare il motore, nel circuito di alimentazione è incluso uno statore, dopodiché la resistenza del reostato di avviamento viene gradualmente rimossa dal circuito del rotore. All'avviamento del motore, gli anelli di contatto vengono cortocircuitati dai contatti del motorino di avviamento,

Sezione longitudinale di un motore elettrico asincrono con rotore di fase
Sulla fig. 171 mostra una sezione longitudinale di un motore a induzione con rotore di fase. Nel caso 6 l'avvolgimento dello statore 5 è posizionato, disposto in scanalature 4 acciaio dello statore. nelle scanalature 2 il rotore in acciaio è avvolto 3 rotore.
L'avviamento di un motore elettrico con rotore a gabbia di scoiattolo può essere effettuato accendendo direttamente l'avviatore alla piena tensione di esercizio del circuito (metodo di avviamento diretto). Tuttavia, a causa di un forte aumento dell'e. ds e corrente di avviamento, la tensione nel target al momento di avviamento diminuisce, il che influisce negativamente sul funzionamento del motore di azionamento e di altri consumatori alimentati da questo circuito.
Nel caso di una grande corrente di spunto, per ridurla, i motori asincroni con rotore a gabbia di solito vengono avviati in due modi: commutando gli avvolgimenti dello statore al momento dell'avviamento da una stella a un triangolo, se gli avvolgimenti dello statore sono collegato a triangolo durante il normale funzionamento del motore elettrico, oppure accendendo il motore elettrico tramite un reostato di avviamento (o autotrasformatore) nei circuiti dello statore.
Il motore viene arrestato spegnendo il contattore. Dopo l'arresto del motore, il reostato di avviamento o l'autotrasformatore sono completamente inseriti. La velocità di rotazione dei motori asincroni è regolata modificando la resistenza del reostato incluso nel circuito del rotore (per motori elettrici con rotore di fase) e commutando gli avvolgimenti dello statore per modificare il numero di coppie polari (per motori elettrici con uno scoiattolo -rotore a gabbia).
L'inversione del senso di rotazione dei motori a induzione si ottiene modificando la direzione del campo magnetico rotante dello statore commutando due qualsiasi delle tre fasi dell'avvolgimento dello statore (utilizzando i fili che collegano i morsetti dell'avvolgimento dello statore al circuito) utilizzando un convenzionale bipolare interruttore.
I motori asincroni hanno un design semplice, hanno dimensioni e peso inferiori rispetto ai motori CC, per cui sono molto più economici. Inoltre, sono più affidabili nel funzionamento, richiedono meno attenzioni durante la manutenzione a causa dell'assenza di un collettore rotante e di un apparato a spazzole; hanno un'efficienza maggiore, la loro attrezzatura di controllo è molto più semplice ed economica di quella dei motori a corrente continua. I motori asincroni funzionano senza scintille, cosa possibile nelle macchine DC con commutazione interrotta, quindi sono più sicuri in termini di incendio.
I principali vantaggi elencati dei motori asincroni spiegano l'attuale tendenza all'introduzione diffusa della corrente alternata sulle navi marittime. Va notato che nell'industria i motori asincroni hanno conquistato da tempo una posizione dominante rispetto ad altri tipi di motori elettrici.
I motori asincroni sono costruiti con potenza da frazioni di kilowatt a molte migliaia di kilowatt. Le navi marine utilizzano principalmente motori asincroni con rotore a gabbia di scoiattolo, disponibili in versione impermeabile e antispruzzo e con tensione nominale di 380/220 V.
Domande di prova:
1. Qual è il principio del generatore CC?
2. Quali sono le parti principali di una macchina elettrica a corrente continua e qual è il loro scopo?
3. Come sono divise le macchine DC in base al design?
4. Qual è il principio di funzionamento del motore a corrente continua?
5. Quali sono le regole base per la manutenzione delle macchine elettriche in corrente continua?
6. Quali macchine sono dette sincrone e qual è il principio del loro funzionamento?
7. A cosa servono i trasformatori, qual è il loro design e principio di funzionamento?
8. Quali motori sono chiamati asincroni e qual è il principio del loro funzionamento?
9. Come sono suddivisi i motori asincroni in base al design del rotore?
EQUIPAGGIAMENTO ELETTRICO DELLE NAVI
Le apparecchiature elettriche della nave sono progettate per fornire controllo, comunicazioni radio, funzionamento di stazioni radar e condizioni abitative della nave.
Equipaggiamento elettrico: qualsiasi nave è composta da quattro elementi obbligatori (Fig. 1) - fonti di elettricità; dispositivi di distribuzione (quadri elettrici, controllo di impianti elettrici); reti elettriche; consumatori di energia elettrica.

Riso. 1. Sistema di alimentazione elettrica della nave (opzione): 1- turbogeneratori principali (principali); 2- quadro di distribuzione principale; 3 - alimentatori in standby; 4 - quadri di distribuzione di gruppo; # 5 - consumatori di elettricità
Le macchine AC sono progettate per convertire l'energia meccanica in energia elettrica (generatori) o per convertire l'energia elettrica in energia meccanica (motori).
Si dividono in:
Asincrono
Sincrono
Per i primi, la frequenza di rotazione del campo magnetico differisce dalla frequenza di rotazione del rotore, mentre per i secondi no.
MPT asincrono e sincrono sono:
con rotore a gabbia di scoiattolo
Con rotore di fase
A seconda del numero di fasi, sono divise in monofase, bifase e trifase.
78. Dispositivo, principio di funzionamento e caratteristiche dei motori asincroni trifase.
Le parti principali dell'IM sono uno statore fisso e un rotore rotante, separati da un traferro.
statoreè costituito da un alloggiamento in alluminio o ghisa, all'interno del quale si trova il nucleo dello statore, un cilindro cavo costituito da fogli di acciaio elettrico isolati l'uno dall'altro. Sulla superficie interna di questo cilindro è posizionato nelle scanalature avvolgimento trifase di tre parti identiche, dette fasi. Le fasi dell'avvolgimento sono collegate da una stella o da un triangolo e collegate a una rete trifase.
Rotoreè un'anima cilindrica costituita da lamiere di acciaio elettrico isolate tra loro con scanalature sulla superficie esterna, in cui sono posti i conduttori dell'avvolgimento del rotore. L'avvolgimento di un rotore a gabbia di scoiattolo è realizzato sotto forma di una ruota di scoiattolo, una gabbia cilindrica realizzata con barre di rame o alluminio, che sono posate senza isolamento nelle scanalature del rotore. Le estremità delle aste sono cortocircuitate su entrambi i lati del rotore con anelli.
Il principio di azione della pressione sanguignaè il seguente: quando l'avvolgimento dello statore è alimentato dalla rete corrente trifase lo statore crea un campo magnetico rotante che penetra nel nucleo dello statore, nel rotore e nel traferro. Il campo magnetico rotante attraversa i conduttori del rotore e induce in essi un EMF, sotto l'azione del quale si formano correnti nei conduttori del rotore. L'interazione delle correnti del rotore con un campo magnetico rotante crea una coppia M, sotto l'azione della quale ruota il rotore.
Per AD si distinguono i seguenti tipi di caratteristiche: meccaniche e di lavoro. La caratteristica meccanica è la dipendenza della velocità del rotore dal carico. Le caratteristiche prestazionali sono le dipendenze della velocità di rotazione n, il momento sull'albero M 2, la corrente dello statore I 1, il coefficiente azione utileƞ e fattore di potenza cosφ dalla potenza utile P 2 .
79. Modalità di funzionamento, caratteristiche meccaniche e prestazionali dei motori asincroni trifase.
Modalità di funzionamento del motore: continuo, di breve durata, intermittente.
La caratteristica meccanica è la dipendenza della velocità del rotore n dalla coppia sull'albero. L'idoneità dell'IM a guidare vari meccanismi dipende dalla sua natura. Le caratteristiche prestazionali sono le dipendenze della velocità di rotazione n, della coppia sull'albero M 2, della corrente dello statore I 1, del rendimento ƞ e del fattore di potenza cosφ dalla potenza utile P 2. Queste caratteristiche servono a rivelare appieno le proprietà del motore stesso. Le caratteristiche di funzionamento sono mostrate in figura.
80. Diagramma energetico ed efficienza. motori asincroni trifase.
 Il valore iniziale è la potenza P1 = U1I1cosφ1 fornita al motore da una rete in corrente trifase. Parte di questa potenza ΔРpr1 viene utilizzata per riscaldare i conduttori degli avvolgimenti dello statore. Il resto della potenza Рvrp = Р1 - ΔРpr1 viene convertito nella potenza del campo magnetico rotante. Di esso, parte della potenza ΔРm viene spesa per le perdite nel circuito magnetico. Queste perdite sono costituite da perdite di isteresi e perdite di correnti parassite. Le perdite nel nucleo del rotore non svolgono un ruolo pratico, perché sono proporzionali a f2 e f2 è molto piccolo. Pertanto, il rotore viene trasmesso attraverso il traferro potenza elettromagnetica Rem \u003d Rvrm - ΔRm. Potenza meccanica trasmessa al rotore Rm = Rem - ΔRpr2, dove ΔRpr2 è la potenza delle perdite nell'avvolgimento del rotore e la potenza utile sull'albero del rotore P2 = Pmech - ΔRmech - ΔRdob, dove ΔRmech - perdite meccaniche, ΔRdb - perdite aggiuntive create da la pulsazione del campo magnetico. Efficienza del motore η = Р2 / Р1 = Р2 / (Р2 + ΔРс + ΔРе), dove ΔРс sono perdite costanti. ΔРс = ΔРm + ΔРmech. ΔRe – perdite variabili. ΔRe = ΔРpr1 + ΔРpr2.
Il valore iniziale è la potenza P1 = U1I1cosφ1 fornita al motore da una rete in corrente trifase. Parte di questa potenza ΔРpr1 viene utilizzata per riscaldare i conduttori degli avvolgimenti dello statore. Il resto della potenza Рvrp = Р1 - ΔРpr1 viene convertito nella potenza del campo magnetico rotante. Di esso, parte della potenza ΔРm viene spesa per le perdite nel circuito magnetico. Queste perdite sono costituite da perdite di isteresi e perdite di correnti parassite. Le perdite nel nucleo del rotore non svolgono un ruolo pratico, perché sono proporzionali a f2 e f2 è molto piccolo. Pertanto, il rotore viene trasmesso attraverso il traferro potenza elettromagnetica Rem \u003d Rvrm - ΔRm. Potenza meccanica trasmessa al rotore Rm = Rem - ΔRpr2, dove ΔRpr2 è la potenza delle perdite nell'avvolgimento del rotore e la potenza utile sull'albero del rotore P2 = Pmech - ΔRmech - ΔRdob, dove ΔRmech - perdite meccaniche, ΔRdb - perdite aggiuntive create da la pulsazione del campo magnetico. Efficienza del motore η = Р2 / Р1 = Р2 / (Р2 + ΔРс + ΔРе), dove ΔРс sono perdite costanti. ΔРс = ΔРm + ΔРmech. ΔRe – perdite variabili. ΔRe = ΔРpr1 + ΔРpr2.
L'efficienza del motore varia con il carico del motore. Fattore di carico β = P2 / P2nom. Tenendo conto del fattore di carico η = βР2 / (βР2 + ΔРс + β 2 ΔРе).
Grafico dell'efficienza rispetto a β
 Di solito efficienza = 0,75 - 0,95.
Di solito efficienza = 0,75 - 0,95.
All'aumentare del carico, cosφ = P1 / S1 = P1 / (P1 2 + Q1 2) 0,5 = 1 / (1 + (Q1 2 / P1 2)) aumenta, perché aumenta P1 e Q1 rimane costante. Con un ulteriore aumento di β, il flusso di dispersione del flusso magnetico aumenta, quindi Q1 aumenta e cosφ diminuisce. È opportuno utilizzare IM a carichi prossimi a quelli nominali (β = 1).
torna su 81. Modi per controllare la velocità dei motori asincroni trifase.
Scriviamo la formula per determinare la velocità di rotazione:  .
.
La velocità di un motore asincrono può essere controllata variando lo scorrimento, il numero di coppie polari e la frequenza della corrente di rete.
1. Il cambio dello slip può essere ottenuto in 3 modi:
1.1. variando la tensione simmetrica U 1 fornita allo statore;
Quando invariato. coppia sull'albero motore, un aumento della tensione provoca un aumento della velocità del motore, ma la gamma di variazione della frequenza è piccola, il che è spiegato da una zona ristretta di funzionamento stabile del motore. Inoltre, significa. un aumento della tensione provoca il surriscaldamento del motore e una diminuzione della tensione riduce la capacità di sovraccarico  .
.
1.2. violazione della simmetria di questa tensione;
La violazione della simmetria della tensione di ingresso viene effettuata utilizzando un autotrasformatore incluso in una delle fasi. Quando la tensione all'ingresso dell'autotrasformatore diminuisce, la tensione all'uscita dell'autotrasformatore aumenta in modo asimmetrico e la velocità di rotazione diminuisce. Gli svantaggi sono una diminuzione dell'efficienza del motore e una zona di controllo ristretta. È applicato a BP di piccola potenza.
1.3. modificare resistenza attiva circuiti del rotore.
Si applica all'INFERNO con un rotore di fase.
2. Controllo della velocità modificando la frequenza della corrente di rete (controllo della frequenza).
Ciò richiede fonti di alimentazione con frequenza di corrente regolabile, che vengono utilizzate come convertitori di frequenza a semiconduttore e elettromagnetico. Ma al variare della frequenza della corrente cambia anche la coppia elettromagnetica del motore, quindi, per mantenere la coppia, il fattore di potenza e l'efficienza del motore, è necessario modificare contemporaneamente la tensione di rete. Se la regolazione viene eseguita in condizioni di carico costante, la tensione deve essere modificata in proporzione alla frequenza. Il controllo della frequenza consente di modificare senza problemi la velocità di rotazione in un'ampia gamma.
3. Modifica della velocità modificando il numero di coppie di poli.
Questo metodo viene utilizzato solo per IM con un rotore a gabbia di scoiattolo e fornisce solo un controllo graduale della frequenza. La modifica del numero di coppie di poli può essere eseguita in due modi:
1) nelle cave dello statore sono posti due avvolgimenti di diverso numero di coppie di poli non collegati elettricamente tra loro. Includendo diversi avvolgimenti nella rete, si ottengono velocità diverse. Gli svantaggi del metodo sono: un aumento delle dimensioni e del peso dell'AD;
2) nelle cave dello statore è posizionato un avvolgimento, il cui circuito, commutando, consente di ridurre il numero di coppie di poli, ad esempio l'avvolgimento di fase è costituito da due bobine, con la loro connessione seriale = 2, e con parallelo connessione = 1. L'inizio e la fine degli avvolgimenti sono portati ai terminali dello schermo, quindi è possibile effettuare la commutazione con il motore acceso.
82. Schemi di controllo per motori asincroni trifase.
 Il più semplice schema di controllo del motore. In questo circuito, quando viene premuto il pulsante SB1, viene applicata tensione alla bobina del contattore KM1. Il contattore KM1 è acceso e collega lo statore del motore M alla rete con i suoi contatti principali NO. Il motore si avvia. Quando il pulsante SB1 viene rilasciato, il circuito della bobina del contattore KM1 viene aperto, il contattore viene spento e il motore viene spento. Questo schema viene utilizzato durante gli avviamenti di regolazione dell'azionamento elettrico, quando non è necessario un funzionamento a lungo termine.
Il più semplice schema di controllo del motore. In questo circuito, quando viene premuto il pulsante SB1, viene applicata tensione alla bobina del contattore KM1. Il contattore KM1 è acceso e collega lo statore del motore M alla rete con i suoi contatti principali NO. Il motore si avvia. Quando il pulsante SB1 viene rilasciato, il circuito della bobina del contattore KM1 viene aperto, il contattore viene spento e il motore viene spento. Questo schema viene utilizzato durante gli avviamenti di regolazione dell'azionamento elettrico, quando non è necessario un funzionamento a lungo termine.
In questo circuito il motore si accende premendo il pulsante SB1 e continua a funzionare dopo il rilascio del pulsante, grazie al contatto ausiliario di chiusura KM1, che si chiude all'accensione del contattore e fornisce corrente alla bobina dopo che il pulsante è stato premuto. rilasciato, cioè blocca il pulsante di avvio SB1. Per fermare il motore, è necessario premere il pulsante SB2, che apre il circuito di alimentazione della bobina del contattore. Questo schema trova la più ampia applicazione per il controllo di motori elettrici di meccanismi non reversibili come pompe, ventilatori, ecc.
 Questo schema viene utilizzato per controllare i motori che devono avere un senso di rotazione avanti e indietro del rotore. In questo circuito, il cambio del senso di rotazione del motore viene effettuato commutando due fasi dello statore spegnendo il contattore KM1 e accendendo il contattore KM2. Quando si preme il pulsante SB1, il contattore KM1 si accende e il motore ruoterà in direzione “avanti” (a condizione che il contattore KM2 sia spento e il suo contatto ausiliario NC KM2 sia chiuso nel circuito di potenza della bobina del contattore KM1 ). Per cambiare il senso di rotazione è necessario prima spegnere il motore premendo il pulsante SB2 e solo successivamente premere il pulsante SB3. Interrompendo il contatto ausiliario KM1 nel circuito della bobina del contattore KM2 e il contatto ausiliario KM2 nel circuito della bobina del contattore KM1 effettuano il blocco elettrico dei contattori, ad es. escludere la possibilità di funzionamento simultaneo dei contattori KM1 e KM2. In assenza di questo blocco, i contattori KM1 e KM2 possono essere attivati indipendentemente l'uno dall'altro, il che porterà a corto circuito due fasi dei contatti di rete.
Questo schema viene utilizzato per controllare i motori che devono avere un senso di rotazione avanti e indietro del rotore. In questo circuito, il cambio del senso di rotazione del motore viene effettuato commutando due fasi dello statore spegnendo il contattore KM1 e accendendo il contattore KM2. Quando si preme il pulsante SB1, il contattore KM1 si accende e il motore ruoterà in direzione “avanti” (a condizione che il contattore KM2 sia spento e il suo contatto ausiliario NC KM2 sia chiuso nel circuito di potenza della bobina del contattore KM1 ). Per cambiare il senso di rotazione è necessario prima spegnere il motore premendo il pulsante SB2 e solo successivamente premere il pulsante SB3. Interrompendo il contatto ausiliario KM1 nel circuito della bobina del contattore KM2 e il contatto ausiliario KM2 nel circuito della bobina del contattore KM1 effettuano il blocco elettrico dei contattori, ad es. escludere la possibilità di funzionamento simultaneo dei contattori KM1 e KM2. In assenza di questo blocco, i contattori KM1 e KM2 possono essere attivati indipendentemente l'uno dall'altro, il che porterà a corto circuito due fasi dei contatti di rete.